Pixy2 CMUcam5 - Smart Vision Sensor
- BrandCharmed Labs


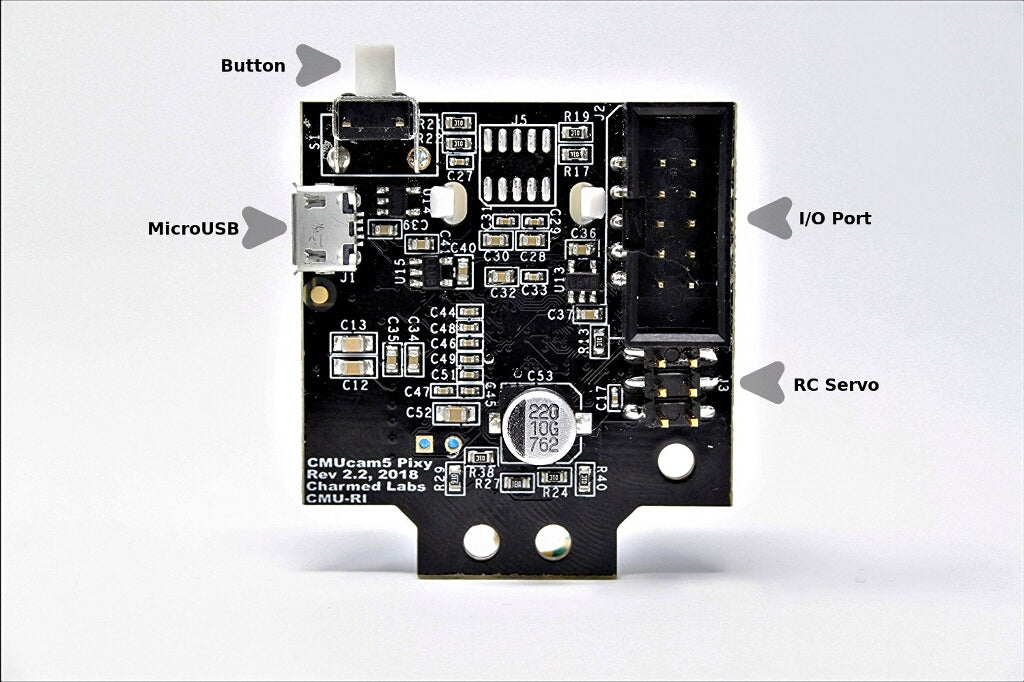
Pixy2 comes with various cables so that you can connect it with an Arduino or a Raspberry Pi out of... Read more
€ 89,95 incl. VAT
Members € 80,96
Details
SKU: 18693
EAN: 700600596537
