STM32 Nucleo family of processors are manufactured by STMicroelectronics. These are low-cost ARM microcontroller development boards. This book is about developing projects using the popular STM32CubeIDE software with the Nucleo-L476RG development board. In the early Chapters of the book the architecture of the Nucleo family is briefly described.The book covers many projects using most features of the Nucleo-L476RG development board where the full software listings for the STM32CubeIDE are given for each project together with extensive descriptions. The projects range from simple flashing LEDs to more complex projects using modules, devices, and libraries such as GPIO, ADC, DAC, I²C, SPI, LCD, DMA, analogue inputs, power management, X-CUBE-MEMS1 library, DEBUGGING, and others. In addition, several projects are given using the popular Nucleo Expansion Boards. These Expansion Boards plug on top of the Nucleo development boards and provide sensors, relays, accelerometers, gyroscopes, Wi-Fi, and many others. Using an expansion board together with the X-CUBE-MEMS1 library simplifies the task of project development considerably.All the projects in the book have been tested and are working. The following sub-headings are given for each project: Project Title, Description, Aim, Block Diagram, Circuit Diagram, and Program Listing for the STM32CubeIDE.In this book you will learn about
STM32 microcontroller architecture;
the Nucleo-L476RG development board in projects using the STM32CubeIDE integrated software development tool;
external and internal interrupts and DMA;
DEBUG, a program developed using the STM32CubeIDE;
the MCU in Sleep, Stop, and in Standby modes;
Nucleo Expansion Boards with the Nucleo development boards.
What you need
a PC with Internet connection and a USB port;
STM32CubeIDE software (available at STMicroelectronics website free of charge)
the project source files, available from the book’s webpage hosted by Elektor;
Nucleo-L476RG development board;
simple electronic devices such as LEDs, temperature sensor, I²C and SPI chips, and a few more;
Nucleo Expansion Boards (optional).
Projects with Arduino Uno & Raspberry Pi with Examples for the MCP2515 CAN Bus Interface Module This book details the use of the Arduino Uno and the Raspberry Pi 4 in practical CAN bus based projects. Using either the Arduino Uno or the Raspberry Pi with off-the-shelf CAN bus interface modules considerably ease developing, debugging, and testing CAN bus based projects. This book is written for students, practicing engineers, enthusiasts, and for everyone else wanting to learn more about the CAN bus and its applications. The book assumes that the reader has some knowledge of basic electronics. Knowledge of the C and Python programming languages and programming the Arduino Uno using its IDE and Raspberry Pi will be useful, especially if the reader intends to develop microcontroller-based projects using the CAN bus. The book should be a useful source of reference material for anyone interested in finding answers to questions such as: What bus systems are available for the automotive industry? What are the principles of the CAN bus? How can I create a physical CAN bus? What types of frames (or data packets) are available in a CAN bus system? How can errors be detected in a CAN bus system and how dependable is a CAN bus system? What types of CAN bus controllers exist? How do I use the MCP2515 CAN bus controller? How do I create 2-node Arduino Uno-based CAN bus projects? How do I create 3-node Arduino Uno-based CAN bus projects? How do I set the acceptance masks and acceptance filters? How do I analyze data on the CAN bus? How do I create 2-node Raspberry Pi-based CAN bus projects? How do I create 3-node Raspberry Pi-based CAN bus projects?
The Joy-Car is an autonomous robot based on micro:bit and offers a modular robotics learning kit. With the help of the detailed manual, all assemblies and their functions as a whole machine are explained, as well as details of programming and codes.Sensors such as line tracking, ultra sonic, infrared and wheel speed sensors provide functions such as autonomous driving and even the control via Bluetooth via a second, separate micro:bit.The additional equipment simulates indicators, lights, reversing light and horn, thus complement the experience of an autonomous robot car. With addressable LEDs, individual lighting scenarios can also be realized.SpecificationsPower Supply
4x AA batteries
Alternatively: 4.5-9 VDC
Functions & Features
Learning the individual components as a whole machine
Suitable from 9 years on, ideal for school purposes
Detailed instructions for programming including codes
Programming languages: Micro:Python and MakeCode
Autonomous driving by line finder, ultrasonic and infrared
BT-control via separate 2nd micro:bit possible
Simulation of indicators, lights, reversing light and horn
Compatible with micro:bit v1 and v2
Included sensors
2x Speed sensor
3x Line tracking sensor
1x Ultrasonic sensor
2x Obstacle sensor
Included electronic assembly
1x Joy-Car mainboard
2x Gear motor
2x Servo motor
4x LED board
1x Battery case
Dimensions189 x 171 x 77 mmIncluded items
Joy-Car Acryl Kit
Sensors
Electronics assembly
Mounting material
Connection cables
RequiredBBC micro:bit v1 or v2Downloads
Manual
MakeCode Tutorials
Websitehttps://joycar.joy-it.net/en/
Projects with Arduino Uno & Raspberry Pi with Examples for the MCP2515 CAN Bus Interface Module This book details the use of the Arduino Uno and the Raspberry Pi 4 in practical CAN bus based projects. Using either the Arduino Uno or the Raspberry Pi with off-the-shelf CAN bus interface modules considerably ease developing, debugging, and testing CAN bus based projects. This book is written for students, practicing engineers, enthusiasts, and for everyone else wanting to learn more about the CAN bus and its applications. The book assumes that the reader has some knowledge of basic electronics. Knowledge of the C and Python programming languages and programming the Arduino Uno using its IDE and Raspberry Pi will be useful, especially if the reader intends to develop microcontroller-based projects using the CAN bus. The book should be a useful source of reference material for anyone interested in finding answers to questions such as: What bus systems are available for the automotive industry? What are the principles of the CAN bus? How can I create a physical CAN bus? What types of frames (or data packets) are available in a CAN bus system? How can errors be detected in a CAN bus system and how dependable is a CAN bus system? What types of CAN bus controllers exist? How do I use the MCP2515 CAN bus controller? How do I create 2-node Arduino Uno-based CAN bus projects? How do I create 3-node Arduino Uno-based CAN bus projects? How do I set the acceptance masks and acceptance filters? How do I analyze data on the CAN bus? How do I create 2-node Raspberry Pi-based CAN bus projects? How do I create 3-node Raspberry Pi-based CAN bus projects?
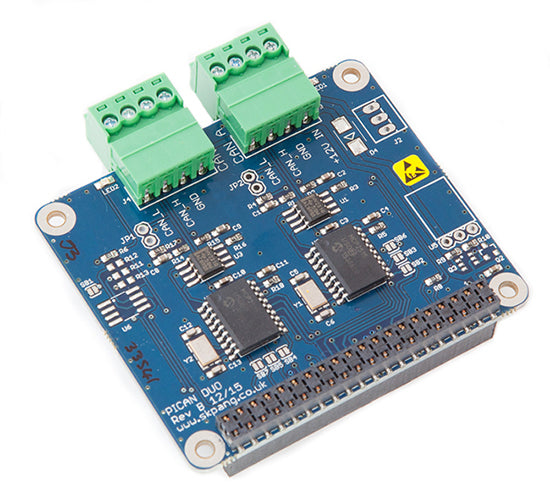
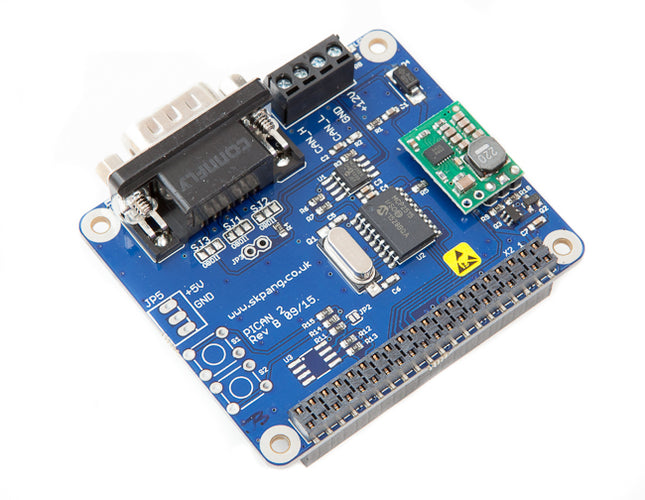
This PiCAN2 DUO board provides two independent CAN-Bus channels for the Raspberry Pi 2/3. It uses the Microchip MCP2515 CAN controller with MCP2551 CAN transceiver. Connections are made via 4-way screw terminal. This board is also available with a 5V 1A SMPS that can power the Pil via the screw terminals as well. The SocketCAN driver doesn't take much effort to install and you can do all the programming in C or Python. Features CAN V2.0B at 1 Mb/s High-speed SPI Interface (10 MHz) Standard and extended data and remote frames CAN connection screw terminal 120Ω terminating resistor Serial LCD LED indicator Four fixing holes, which comply with Pi Hat standard SocketCAN driver, that appears as can0 and can1 to application RX interrupt on GPIO25 and GPIO24 Downloads User guide Schematic Rev B Software installation Writing your own program in Python
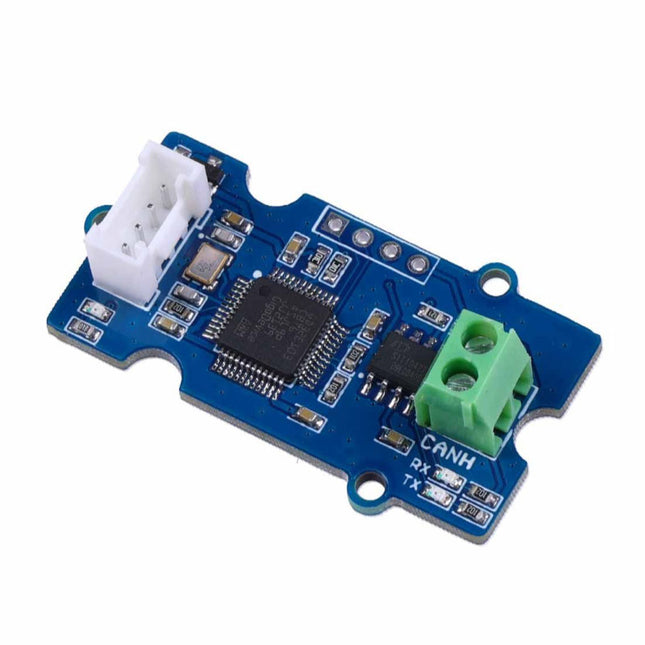
This Grove CAN-BUS Module based on GD32E103 adopts a brand-new design, uses the cost-effective and high-performance GD32E103 microcontroller as the main control and cooperates with a firmware we wrote to complete the function of the serial port to CAN FD. Features
Support CAN communication: Implements CAN FD at up to 5 Mb/s
Easy to program: Support AT command which enables simple serial port programming
Grove ecosystem: 20 x 40 x 10 mm small size, 4-pin Grove connector to plug and play, Arduino compatible This Grove CAN-BUS Module supports CAN FD(CAN with Flexible Data-Rate) communication, which is an extension to the original CAN protocol as specified in ISO 11898-1 that responds to increased bandwidth requirements in automotive networks. In CAN FD, the data rate (i.e. number of bits transmitted per second) is increased to be 5 times faster than the classic CAN (5 Mbit/s for the data payload only, the arbitration bit rate is still limited to 1Mbit/s for compatibility). It supports AT command which enables simple serial port programming. This Grove CAN-BUS Module is based on GD32E103 with a frequency up to 120 MHz. It has a flash size from 64 KB to 128 KB and an SRAM size from 20 KB to 32 KB. Applications Car hacking: allows different parts of the vehicle to talk to each other, including the engine, the transmission, and the brakes. Windows, doors, and mirror adjustment. 3D Printers Building automation Lighting control systems Medical instruments and equipment Specifications MCU GD32E103 UART baud rate Up to 115200 (default 9600) CAN FD baud rate Up to 5 Mb/s Indicator TX and RX led Working voltage 3.3 V Grove connector 4-pin Grove connector to plug and play Size 20 x 40 x 10 mm Downloads Datasheet GitHub
CrowBot BOLT is an ESP32-controlled, intelligent, simple and easy-to-use open source robot car. It is compatible with the Arduino and MicroPython environments, with graphical programming via Letscode. 16 learning courses with interesting experiments are available. Features 16 lessons in three languages (Letscode, Arduino, Micropython), fast learning and fun experiments Compatible with Arduino, MicroPython development environment, using Letscode graphical programming, easy to use Strong scalability, with a variety of interfaces, can be expanded and used with Crowtail modules A variety of remote control modes, you can use the infrared remote control and joystick to control the car Specifications Processor ESP32-Wrover-B (8 MB) Programming Letscode, Arduino, Micropython Control method Bluetooth Remote Control/Infrared Remote Control Input Button, Light sensor, Infrared Receiving Module, Ultrasonic Sensor, Line Tracking Sensor Output Buzzer, Programmable RGB Light, Motor Wifi & Bluetooth Yes Light sensor Can realize the function of chasing light or avoiding light Ultrasonic Sensor When an obstacle is detected, the driving route of the car can be corrected to avoid the obstacle Line Tracking Sensor Can make the car move along the dark/black lines, intelligently judge and correct the driving path Buzzer Can make the car sound/whistle, bringing a more direct sensory experience Programmable RGB Light Through programming, it can show colorful lights in different scenes Infrared receiver Receive infrared remote control signals to realize remote control Interfaces 1x USB-C, 1x I²C, 1x A/D Motor type GA12-N20 Micro DC Gear Motor Operating temperature -10℃~+55℃ Power supply 4x 1.5 V batteries (not included) Battery life 1.5 hours Dimensions 128 x 92 x 64 mm Weight 900 g Included 1x Chassis 1x Ultrasonic Sensor 1x Battery Holder 2x Wheels 4x M3x8 mm Screws 2x M3x5 mm Copper Column 2x Side Acrylic Plates 1x Front Acrylic Plates 1x Screwdriver 2x 4 Pin Crowtail Cable 1x USB-C Cable 1x Infrared remote control 1x Instructions & Line Track Map 1x Joystick Downloads Wiki CrowBot-BOLT_Assembly-Instruction Joystick-for-CrowBot-BOLT_Assembly-Instruction CrowBot_BOLT_Beginner’s_Guide Designing Documents of CrowBot Designing Documents of Joystick
Lesson Code
3D Model Factory Source Code
Features CAN V2.0B at 1 Mb/s High-speed SPI Interface (10 MHz) Standard and extended data and remote frames CAN connection via standard 9-way sub-D connector or screw terminal Compatible with OBDII cable Solder bridge to set different configuration for DB9 connector 120 Ω terminating resistor Serial LCD LED indicator Footprint for two mini push buttons Four fixing holes, comply with Pi Hat standard SocketCAN driver, appears as can0 to application RX interrupt on GPIO25 5 V 1A SMPS to power Raspberry Pi and accessories from DB9 or screw terminal Reverse polarity protection High efficiency switch mode design 6 V to 20 V input range Downloads
User guide
Schematic Rev B Writing your own program in Python
Python3 examples in Github
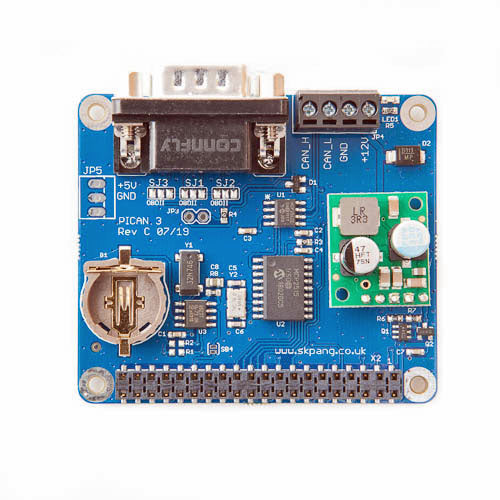
Features CAN v2.0B at 1 Mb/s High speed SPI Interface (10 MHz) Standard and extended data and remote frames CAN connection via standard 9-way sub-D connector or screw terminal Compatible with OBDII cable Solder bridge to set different configuration for DB9 connector 120 Ω terminator ready Serial LCD ready LED indicator Foot print for two mini push buttons Four fixing holes, comply with Pi Hat standard SocketCAN driver, appears as can0 to application Interrupt RX on GPIO25 5 V/3 A SMPS to power Raspberr Pi and accessories from DB9 or screw terminalo Reverse polarity protectiono High efficiency switch mode designo 6 V to 20 V input range RTC with battery backup (battery not included, requires CR1225 cell) Downloads
User guide
Schematic Driver installation Writing your own program in Python
Python3 examples
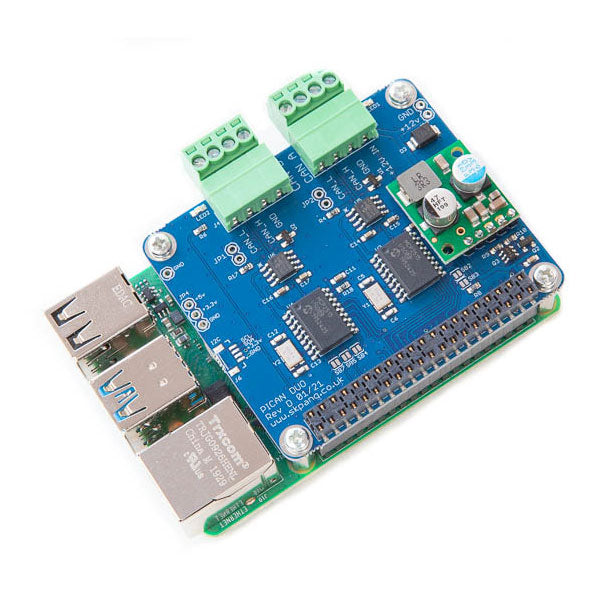
This PiCAN2 Duo board provide two independent CAN-Bus channels for the Raspberry Pi 4. It uses the Microchip MCP2515 CAN controller with MCP2551 CAN transceiver. Connections are made via 4 way screw terminal. This board has a 5 V, 3 A SMPS that can power the RPi is well via the screw terminal. Easy to install SocketCAN driver. Programming can be done in C or Python. Features CAN v2.0B at 1 Mb/s High speed SPI Interface (10 MHz) Standard and extended data and remote frames CAN connection screw terminal 120Ω terminator ready Serial LCD ready LED indicator Four fixing holes, comply with Pi Hat standard SocketCAN driver, appears as can0 and can1 to application Interrupt RX on GPIO25 and GPIO24 5 V, 3 A SMPS to power Raspberry Pi and accessories from screw terminal Reverse polarity protection High efficiency switch mode design 7 V to 24 V input range Downloads
User guide
Schematic Rev D Writing your own program in Python
Python3 examples in Github
This book is about teaching the Python programming language using the Raspberry Pi 4 computer. The book makes an introduction to Raspberry Pi 4 and then teaches Python with the topics: variables, strings, arrays, matrices, tuples, lists, dictionaries, user functions, flow of control, printing, keyboard input, graphics, GUI, object oriented programming and many more topics.
The book is aimed for beginners, students, practising engineers, hobbyists, and for anyone else who may want to learn to program in Python.
The book includes many example programs and case studies. All the example programs and case studies have been tested fully by the author and are all working. The example programs aim to teach the various programming concepts of Python. The case studies cover the use of Python in the analysis and design of electronic circuits. Some of the case study topics are:
Resistor colour code identification
Resistive potential divider circuits
Resistive attenuator design
Zener diode voltage regulator design
RC and RLC transient circuits
Circuit frequency response
Saving data on external memory stick
Mesh and node circuit analysis using matrices
Resonance in RLC circuits
Transistor Biasing analysis
Transistor amplifier design
Design of active filters
Interfacing hardware with GPIO, I²C and SPI
Using Wi-Fi with Python and TCP/IP and UDP programs
Using Bluetooth from Python
Full program listings of all the programs used in the book are available at the Elektor website of the book. Readers should be able just to copy and use these programs in their Raspberry Pi projects without any modifications.
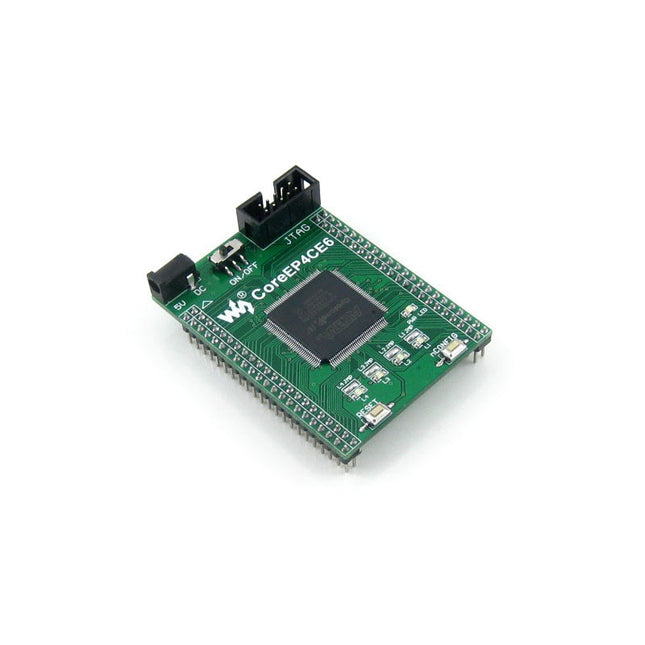
Wveshare CoreEP4CE6 is an FPGA core board that features an EP4CE6E22C8N device onboard supporting further expansion.
Features
Onboard Serial Configuration Device EPCS16SI8N
Integrated FPGA basic circuit, such as clock circuit
Onboard nCONFIG button, RESET button, 4x LEDs
All the I/O ports are accessible on the pin headers
Onboard JTAG debugging/programming interface
2.54 mm header pitch design, suitable for being plugged-in your application system
Downloads
Wiki