Search results for "dtronixs"
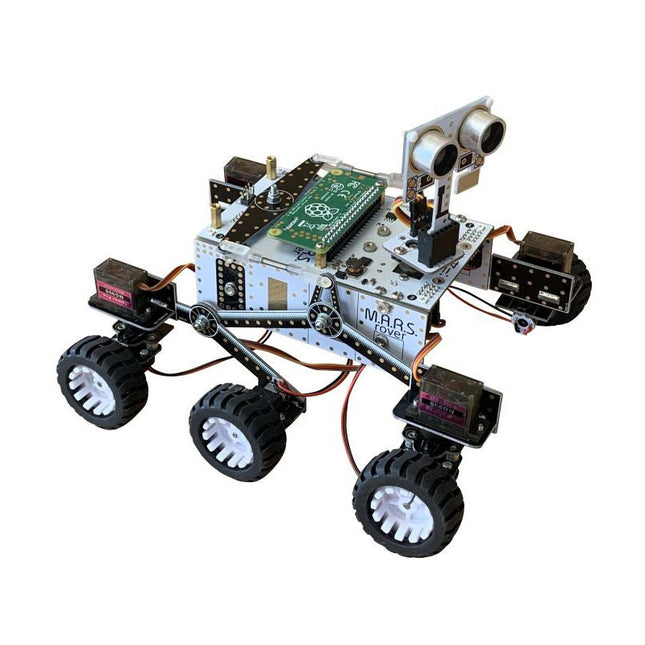
4tronix M.A.R.S. Rover Robot Kit for Raspberry Pi Zero
Inspired by NASA's “Curiosity” and “Perseverance” Mars Rovers, this innovative M.A.R.S. Rover is an autonomous vehicle designed to drive around on rough terrain here on Earth. It uses the same rocker arm, bogey and differential arm mechanism. M.A.R.S. is an acronym for 'Mobile Autonomous Robotic System'. Features 6 Motors: 80 rpm 6 V, N20 micro gear motors 4 Servos: MG90S metal gear analog micro servos 4 FireLEDs Ultrasonic distance sensor on steerable mast Total number of special PCBs: 30 Number of different PCB designs: 11 Length: 200 mm Width: 185 mm Height with Mast: 170 mm Weight excluding Raspberry Pi Zero and batteries: 460 g There is a Python library module for the Raspberry Pi Zero that makes it easy to control the unit. Required Raspberry Pi Zero 4 rechargeable AA batteries Downloads Assembly of 4tronix M.A.R.S. Rover Kit Programming M.A.R.S. Rover on Raspberry Pi Zero Coding using Microsoft Makecode on GitHub
€ 184,95
Members € 166,46
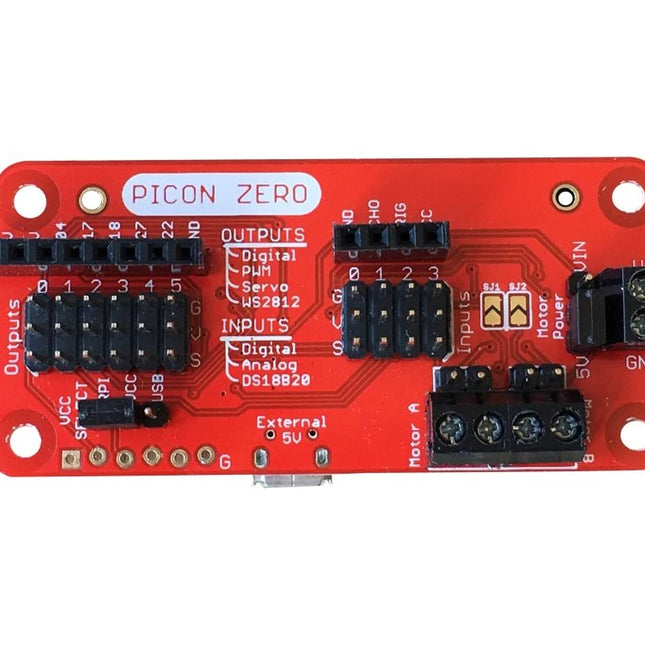
4tronix Picon Zero v1.3 - Intelligent Robotics Controller for Raspberry Pi
The Picon Zero is an add-on for the Raspberry Pi. It has the same size as a Raspberry Pi Zero, making it ideal to function as a pHat. Of course, it can be used on any other Raspberry Pi via a 40-pin GPIO connector.As well as two full H-Bridge motor drivers, the Picon Zero has several Input/Output pins giving you multiple configuration options. That allows you to easily add outputs or analog inputs to your Raspberry Pi without any complicated software or kernel-specific drivers. At the same time, it opens up 5 GPIO pins from the Raspberry Pi, and it provides the interface for an HC-SR04 ultrasonic distance sensor.The Picon Zero comes with all components, including the headers and screw terminals, fully soldered. Soldering isn't required. You can use it right out of the box.Features pHat format PCB: 65 mm x 30 mm Two full H-Bridge motor drivers. Drive up to 1.5 A continuously per channel, at 3 V - 11 V. Each motor output has both a 2-pin male header and a 2-pin screw terminal. The motors can be powered from the Picon Zero's 5 V or an external power source (3 V - 11 V). The Picon Zero's 5 V can be selected to be from the Raspberry Pi's 5 V line, or a USB connector on the Picon Zero. That means that you can effectively have 2 USB battery banks: one to power the servos and motors on the Picon Zero and the other to power the Pi. 4 Inputs that can accept up to 5 V. These inputs can be configured as follows: Digital inputs Analog inputs DS18B20 DHT11 6 Outputs that can drive 5 V and be configured as: Digital Output PWM Output Servo NeoPixel WS2812 All Inputs and Outputs use GVS 3-pin male headers. 4-pin female header that connects directly to an HC-SR04 ultrasonic distance sensor. 8-pin female header for Ground, 3.3 V, 5 V, and 5 GPIO signals allowing you to add their additional features. Hardware ConfigurationPicon Zero has two jumpers for setting the hardware configuration. Ensure that you have placed them in the correct position. JP1 – Board 5 V Selector. This jumper selects where to get the 5 V power from for the Picon Zero Outputs. The options are: Jumper at the top between RPI and 5 V. The 5 V power for the board is taken from the Raspberry Pi pins on the GPIO connector. Because of the low power output devices and the 5 V motors, all devices can be powered with a single 5 V power input. Jumper at the bottom between USB and 5 V. The 5 V power is taken from the microUSB connector on the Picon Zero. Useful for higher power output devices, since you can provide extra power through the micro-USB connector on the board JP2 – Motor Power Selector. This jumper selects where the motors get the power. The two options here are the following: Jumper at the top between MotorPower and Vin. The motors are driven via the 2-pin screw terminal. The voltage can be between 3 V and 11 V. Useful for motors that require a voltage different from 5 V, or that require more current than is available on either of the USB input connectors Jumper at the bottom between 5 V and MotorPower. The motors are driven from the board's 5 V. Raspberry Pi ConfigurationThe Picon Zero is an I²C device. Make sure your Raspberry Pi is set up correctly to use I²C and SMBus: sudo apt-get install python-smbus python3-smbus python-dev python3-dev sudo nano /boot/config.txt Add the following lines at the end of the file dtparam=i2c1=on dtparam=i2c_arm=on Press Ctrl-X and use the default prompts to save sudo reboot Plugin the Picon Zero onto the Pi and run i2cdetect -y 1If everything goes well, you will see the Picon Zero showing up as address 22 as shown below:
€ 18,95€ 13,95
Members identical

