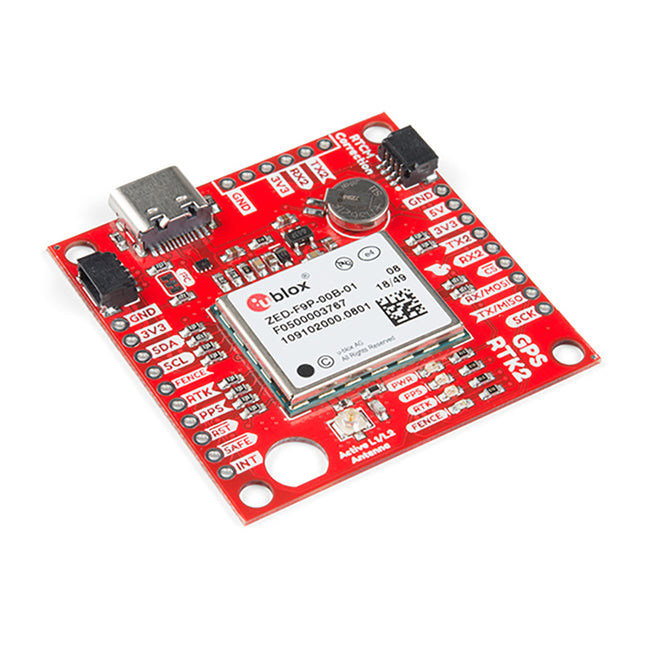
The SparkFun GPS-RTK2 raises the bar for high-precision GPS and is the latest in a line of powerful RTK boards featuring the ZED-F9P module from u-blox. The ZED-F9P is a top-of-the-line module for high accuracy GNSS and GPS location solutions, including RTK capable of 10 mm, three-dimensional accuracy. With this board, you will be able to know where your (or any object's) X, Y, and Z location is within roughly the width of your fingernail! The ZED-F9P is unique in that it is capable of both rover and base station operations. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1'-spaced pins if you prefer to use a breadboard. We've even included a rechargeable backup battery to keep the latest module configuration and satellite data available for up to two weeks. This battery helps 'warm-start' the module decreasing the time-to-first-fix dramatically. This module features a survey-in mode allowing the module to become a base station and produce RTCM 3.x correction data. The number of configuration options of the ZED-F9P is incredible! Geofencing, variable I²C address, variable update rates, even the high precision RTK solution can be increased to 20 Hz. The GPS-RTK2 even has five communications ports which are all active simultaneously: USB-C (which enumerates as a COM port), UART1 (with 3.3 V TTL), UART2 for RTCM reception (with 3.3V TTL), I²C (via the two Qwiic connectors or broken out pins), and SPI. Sparkfun has also written an extensive Arduino library for u-blox modules to easily read and control the GPS-RTK2 over the Qwiic Connect System. Leave NMEA behind! Start using a much lighter weight binary interface and give your microcontroller (and its one serial port) a break. The SparkFun Arduino library shows how to read latitude, longitude, even heading and speed over I²C without the need for constant serial polling. Features Concurrent reception of GPS, GLONASS, Galileo and BeiDou Receives both L1C/A and L2C bands Voltage: 5 V or 3.3 V, but all logic is 3.3 V Current: 68 mA - 130 mA (varies with constellations and tracking state) Time to First Fix: 25 s (cold), 2 s (hot) Max Navigation Rate: PVT (basic location over UBX binary protocol) - 25 Hz RTK - 20 Hz Raw - 25 Hz Horizontal Position Accuracy: 2.5 m without RTK 0.010 m with RTK Max Altitude: 50k m Max Velocity: 500 m/s Weight: 6.8 g Dimensions: 43.5 x 43.2 mm 2x Qwiic Connectors
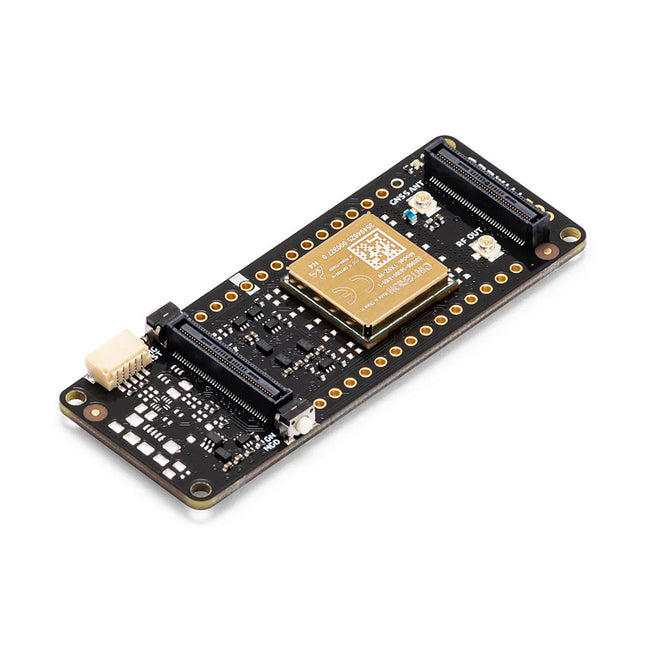
The Portenta Cat. M1/NB IoT GNSS Shield allows you to enhance the connectivity features of your Portenta H7 applications. The shield leverages a Cinterion TX62 wireless module by Thales, designed for highly efficient, low-power IoT applications to deliver optimized bandwidth and performance. The Portenta Cat. M1/NB IoT GNSS Shield combines with the strong edge computing power of the Portenta H7 to enable the development of asset tracking and remote monitoring applications in industrial settings, as well as in agriculture, public utilities and smart cities. The shield offers cellular connectivity to both Cat. M1 and NB-IoT networks with the option to use eSIM technology. Easily track your valuables – across the city or worldwide – with your choice of GPS, GLONASS, Galileo or BeiDou. Features Change connectivity capabilities without changing the board Add NB-IoT, CAT. M1 and positioning to any Portenta product Possibility to create a small multiprotocol router (WiFi - BT + NB-IoT/CAT. M1) Greatly reduce communication bandwidth requirements in IoT applications Low-power module Compatible also with MKR boards Remote Monitoring Industrial and agricultural companies can leverage the Portenta Cat. M1/NB IoT GNSS Shield to remotely monitor gas detectors, optical sensors, machinery alarm systems, biological bug traps and more. Technology providers providing smart city solutions can compound the power and reliability of the Portenta H7 with the Portenta Cat. M1/NB IoT GNSS Shield, to connect data and automate actions for a truly optimized use of resources and enhanced user experience. Asset Monitoring Add monitoring capabilities to any asset by combining the performance and edge computing features of the Portenta family boards. The Portenta Cat. M1/NB IoT GNSS Shield is ideal to monitor valuable goods and also for monitoring industrial machinery and equipment. Specifications Connectivity Cinterion TX62 wireless module; NB-IoT - LTE CAT.M1; 3GPP Rel.14 Compliant Protocol LTE Cat. M1/NB1/NB2; UMTS BANDS: 1 / 2 / 3 / 4 / 5 / 8 / 12(17) / 13 / 18 / 19 / 20 / 25 / 26 / 27 / 28 / 66 / 71 / 85; LTE Cat.M1 DL: max. 300 kbps, UL: max. 1.1 Mbps; LTE Cat.NB1 DL: max. 27 kbps, UL: max. 63 kbps; LTE Cat.NB2 DL: max. 124 kbps, UL: max. 158 kbps Short messaging service (SMS) Point-to-point mobile terminated (MT) and mobile originated (MO) Text Mode; Protocol Data Unit (PDU) Mode Localization support GNSS capability (GPS/BeiDou/Galileo/GLONASS) Other Embedded IPv4 and IPv6 TCP/IP stack access; Internet Services: TCP server/client, UDP client, DNS, Ping, HTTP client, FTP client, MQTT client Secure Connection with TLS/DTLS Secure boot Dimensions 66 x 25.4 mm Operating temperature -40° C to +85° C (-104° F to 185°F) Downloads Datasheet Schematics
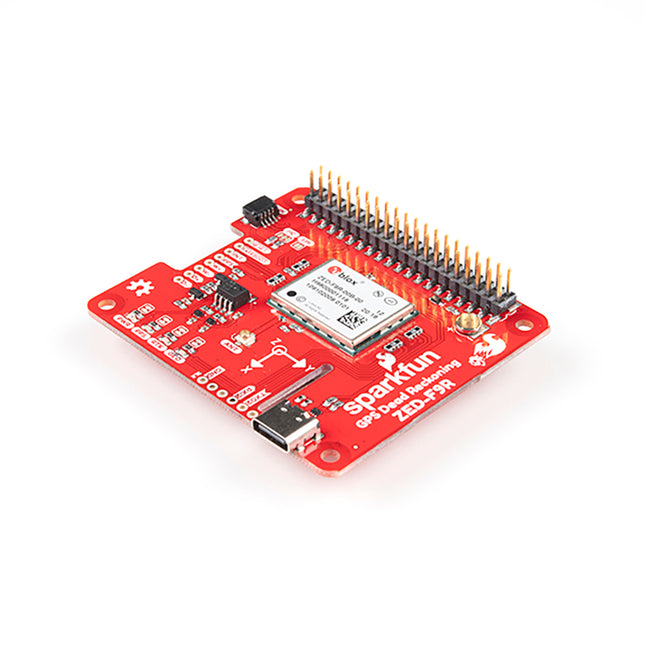
The ZED-F9R module is a 184-channel u-blox F9 engine GNSS receiver, meaning it can receive signals from the GPS, GLONASS, Galileo, and BeiDou constellations with ~0.2-meter accuracy! That's right; such accuracy can be achieved with an RTK navigation solution when used with a correction source. Note that the ZED-F9R can only operate as a rover, so you will need to connect to a base station. The module supports the concurrent reception of four GNSS systems. The combination of GNSS and integrated 3D sensor measurements on the ZED-F9R provide accurate, real-time positioning rates of up to 30Hz. Compared to other GPS modules, this pHAT maximizes position accuracy in dense cities or covered areas. Even under poor signal conditions, continuous positioning is provided in urban environments and is also available during complete signal loss (e.g. short tunnels and parking garages). The ZED-F9R is the ultimate solution for autonomous robotic applications that require accurate positioning under challenging conditions. This u-blox receiver supports a few serial protocols. By default, we chose to use the Raspberry Pi's serial UART to communicate with the module. With pre-soldered headers, no soldering is required to stack the pHAT on a Raspberry Pi, NVIDIA Jetson Nano, Google Coral, or any single-board computer with the 2x20 form factor. We have also broken out a few 0.1'-spaced pins from the u-blox receiver. A Qwiic connector is also added in case you need to connect a Qwiic enabled device. U-blox based GPS products are configurable using the popular but dense, windows program called u-centre. Plenty of different functions can be configured on the ZED-F9R: baud rates, update rates, geofencing, spoofing detection, external interrupts, SBAS/D-GPS, etc. The SparkFun ZED-F9R GPS pHAT is also equipped with an on-board rechargeable battery that provides power to the RTC on the ZED-F9R. This reduces the time-to-first fix from a cold start (~24s) to a hot start (~2s). The battery will maintain RTC and GNSS orbit data without being connected to power for plenty of time. Features 1 x Qwiic Connector Integrated U.FL connector for use with an antenna of your choice Concurrent reception of GPS, GLONASS, Galileo and BeiDou 184-Channel GNSS Receiver Receives both L1C/A and L2C bands Horizontal Position Accuracy: 0.20 m with RTK Max Navigation Rate: Up to 30Hz Time to First Fix Cold: 24 s Hot: 2 s Operational Limits Max G: ≤4 G Max Altitude: 50 km Max Velocity: 500 m/s Velocity Accuracy: 0.5 m/s Heading Accuracy: 0.2 degrees Built-In Accelerometer and Gyroscope Time Pulse Accuracy: 30ns Voltage: 5 V or 3.3 V, but all logic is 3.3 V Current: ~85mA to ~130mA (varies with constellations and tracking state) Software Configurable Geofencing Odometer Spoofing Detection External Interrupt Pin Control Low Power Mode Supports NMEA, UBX, and RTCM protocols over UART
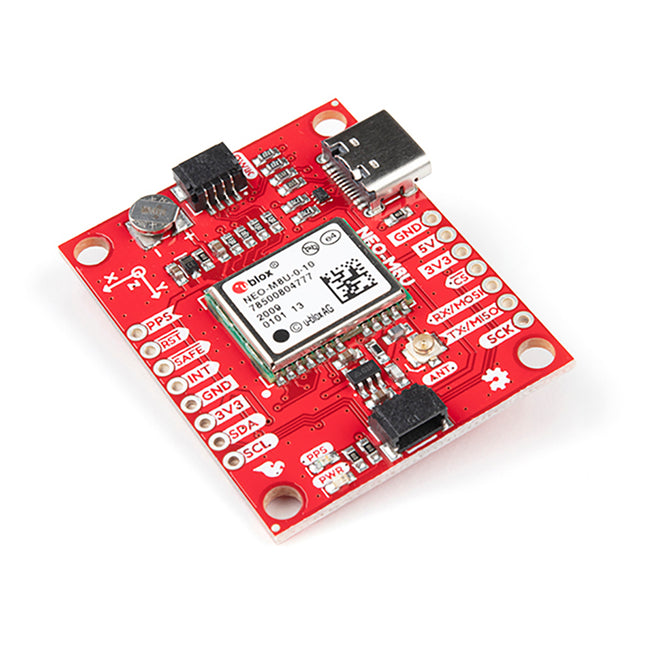
The NEO-M8U module is a 72-channel u-blox M8 engine GNSS receiver, meaning it can receive signals from the GPS, GLONASS, Galileo, and BeiDou constellations with ~2.5-meter accuracy. The module supports the concurrent reception of three GNSS systems. The combination of GNSS and integrated 3D sensor measurements on the NEO-M8U provide accurate, real-time positioning rates of up to 30Hz. Compared to other GPS modules, this breakout maximizes position accuracy in dense cities or covered areas. Even under poor signal conditions, continuous positioning is provided in urban environments and is also available during complete signal loss (e.g. short tunnels and parking garages). With UDR, position begins as soon as power is applied to the board, even before the first GNSS fix is available! Lock time is further reduced with an on-board rechargeable battery; you'll have backup power enabling the GPS to get a hot lock within seconds! Additionally, this u-blox receiver supports I²C (u-blox calls this Display Data Channel), making it perfect for the Qwiic compatibility, so we don't have to use up our precious UART ports. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1'-spaced pins if you prefer to use a breadboard. U-blox based GPS products are configurable using the popular but dense, windows program called u-centre. Plenty of different functions can be configured on the NEO-M8U: baud rates, update rates, geofencing, spoofing detection, external interrupts, SBAS/D-GPS, etc. All of this can be done within the SparkFun Arduino Library! The SparkFun NEO-M8U GPS Breakout is also equipped with an on-board rechargeable battery that provides power to the RTC on the NEO-M8U. This reduces the time-to-first fix from a cold start (~26s) to a hot start (~1.5s). The battery will maintain RTC and GNSS orbit data without being connected to power for plenty of time. Features Integrated U.FL connector for use with an antenna of your choice 72-Channel GNSS Receiver 2.5 m Horizontal Accuracy 30 Hz Max Update Rate Time-To-First-Fix: Cold: 26 s Hot: 1.5 s Max Altitude: 50,000 m Max G: ≤4 Max Velocity: 500 m/s Velocity Accuracy: 0.5m/s Heading Accuracy: 1 degree Built-In Accelerometer and Gyroscope Time Pulse Accuracy: 30 ns 3.3 V VCC and I/O Current Consumption: ~29 mA Continuous Tracking, Default Concurrent Mode Software Configurable Geofencing Odometer Spoofing Detection External Interrupt Pin Control Low Power Mode Many others! Supports NMEA, UBX, and RTCM protocols over UART or I²C interfaces
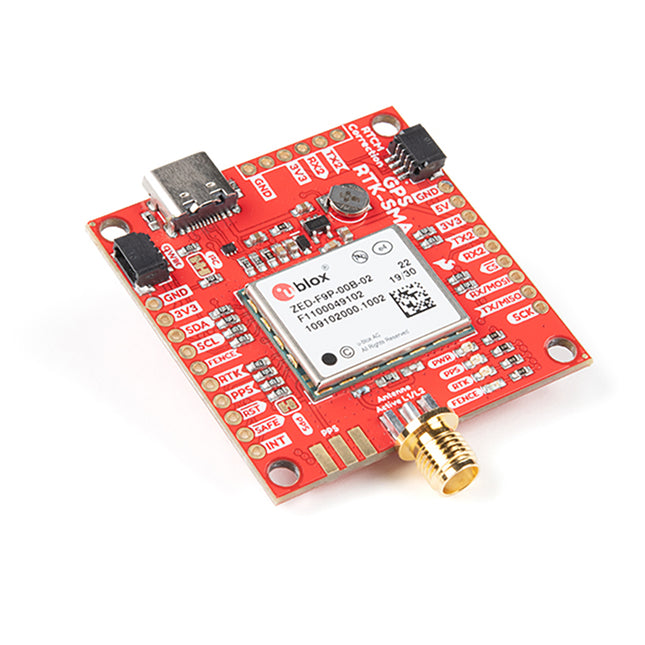
Based on the SparkFun GPS-RTK2 designs, the SparkFun GPS-RTK-SMA raises the bar for high-precision GPS and is the latest in a line of powerful RTK boards featuring the ZED-F9P module from u-blox. The ZED-F9P is a top-of-the-line module for high accuracy GNSS and GPS location solutions, including RTK capable of 10mm, three-dimensional accuracy. With this board, you will be able to know where your (or any object's) X, Y, and Z location is within roughly the width of your fingernail! The ZED-F9P is unique in that it is capable of both rover and base station operations. Utilizing our handy Qwiic system, no soldering is required to connect it to the rest of your system. However, we still have broken out 0.1'-spaced pins if you prefer to use a breadboard. We've included a rechargeable backup battery to keep the latest module configuration and satellite data available for up to two weeks. This battery helps 'warm start' the module decreasing the time-to-first-fix dramatically. This module features a survey-in mode allowing the module to become a base station and produce RTCM 3.x correction data. Based on your feedback, we switched out the u.FL connector and included an SMA connector in this version of the board. The number of configuration options of the ZED-F9P is incredible! Geofencing, variable I²C address, variable update rates, even the high precision RTK solution can be increased to 20Hz. The GPS-RTK2 even has five communications ports which are all active simultaneously: USB-C (which enumerates as a COM port), UART1 (with 3.3V TTL), UART2 for RTCM reception (with 3.3V TTL), I²C (via the two Qwiic connectors or broken out pins), and SPI. SparkFun has also written an extensive Arduino library for u-blox modules to easily read and control the GPS-RTK-SMA over our Qwiic Connect System. Leave NMEA behind! Start using a much lighter weight binary interface and give your microcontroller (and its one serial port) a break. The SparkFun Arduino library shows how to read latitude, longitude, even heading and speed over I²C without the need for constant serial polling. Features Concurrent reception of GPS, GLONASS, Galileo and BeiDou Receives both L1C/A and L2C bands Voltage: 5 V or 3.3 V, but all logic is 3.3 V Current: 68 mA - 130 mA (varies with constellations and tracking state) Time to First Fix: 25 s (cold), 2 s (hot) Max Navigation Rate: PVT (basic location over UBX binary protocol) - 25 Hz RTK - 20 Hz Raw - 25 Hz Horizontal Position Accuracy: 2.5 m without RTK 0.010 m with RTK Max Altitude: 50 km Max Velocity: 500 m/s Weight: 6.8 g Dimensions: 43.5 mm x 43.2 mm 2 x Qwiic Connectors